適切に構造化されたロボットの記述
各ロボットはプログラムであるため、適切に構造化されたロボットの記述は重要です。構造化されていないロボットを記述することは、章や目次のない本を書くようなものです。次の理由から、適切に構造化されたロボットを記述することが重要になります。
- ロボットを文書化することが容易になる。
- ロボットのメンテナンスが容易になる。
- ロボットの操作が容易になる。
適切に構造化されたロボットを記述すると、副次的に Design Studio でロボットがより高速にロードできるようになります。そのため、通常はロボットをロボット ビューで編集すると、応答がより高速になります。
適切に構造化されたロボットを記述するための主なツールに、スニペット ステップとグループ ステップの 2 つがあります。両ステップ タイプでは、ロボットの一部分を取り出し、説明的な名前を付けたり、単一のステップにまとめたりします。このため、ロボットの一部分の機能を詳細に知らなくても、ロボットの全体的な構造に注意を向けることが可能になります。この概念は、メソッド、関数、プロシージャなど、他のプログラミング言語の概念と似ています。
グループ ステップを使用して、明示的に定義されたタスクを実行する複数のステップをまとめたり、非表示にしたりできます。「サイト X へのログイン」や「エラーのレポート」など、ステップに説明的な名前を付けます。グループ ステップの名前は、グループ内のステップの動作について説明する比較的短く説明的な名前にすることが重要です。適切な名前を付けることができなかった場合、明示的に定義されたタスクをグループが実行できない原因になる可能性があります。グループ ステップを導入すると、名前でロボットのその部分の動作を表せるため、ロボットの文書化に役立ちます。
スニペットは主にロボット間の機能の共有に導入されていますが、単一のロボット内で使用してロボットの構造化を支援することもできます。ステップの開始時に結合する、ロボットの各部分からの接続など、ロボット内に複数の分岐で使用されるステップのコレクションがある場合、このようなステップの共有は、ステップを含むスニペットの導入によって置き換えることができます。
次のロボット構造では、接続を結合する代わりに、スニペットとグループが使用されています。
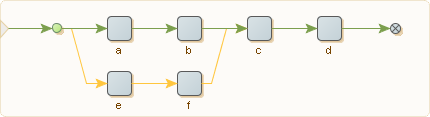
最後の 2 つのステップ c とステップ d は、ステップ a とステップ e で始まる 2 つの分岐で共有されます。実際には、はるかに大きなロボットを作成することがあり、このようにステップを共有する 3 つ以上の分岐が存在し、関連するステップがさらに離れている場合があります。その結果、ロボットの全体像を把握することが難しくなることがあります。ロボットの構造化を向上するために、まず次のようにステップ c とステップ d を含むスニペット ステップを導入できます。
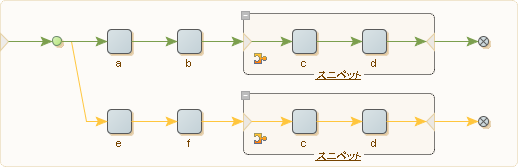
スニペット ステップ内のステップを編集し、2 つの分岐で変更が共有されるようにできます。両方の分岐をグループ ステップに入れて、ロボットをさらに構造化することができます。
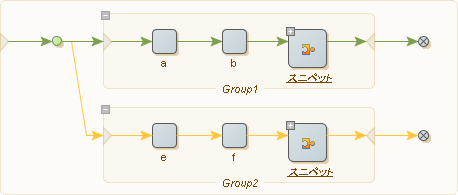
最後に、2 つのグループ ステップを使用して、次の簡単なロボットを記述します。
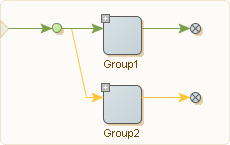
結果として、このロボットは、2 つのタスクのうち 1 つを Group1、もう 1 つを Group2 として実行します。これらの 2 つのグループに説明的な名前を付けることにより、ロボットの構造が元のロボットよりも論理的になります。
これは明らかに非常に簡単な例ですが、ロボットのサイズが特定のサイズを超えて、ロボット ビューに多くの接続が表示されている場合は、ロボットが複雑になりすぎている可能性があります。上記のようにロボットを再構造化すると、ロボットの全体像を管理しやすくなります。