At ターゲット
「次の代替手段を試行」によるエラー処理は、その性質からトライ ステップと呼ばれます。このトライ ステップは、現在の実行パスの前のステップ、つまり現在のステップに至る実行を含むステップの中の 1 つである必要があります。そうでない場合、次の代替手段を試行の「次の代替手段を試行」の部分は意味をなさなくなります。
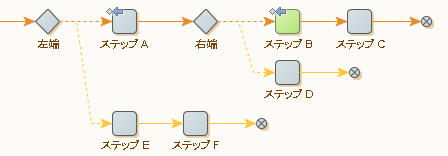
現在の実行パスに複数のトライ ステップがあるロボットについて考えます。この状況で、ロボットはこれらのトライ ステップのそれぞれに関連する「現在の分岐」の実行中で、トライ ステップごとに「次の分岐」は異なります。たとえば次のロボットでは、ステップ B でエラーが発生した場合、「次の代替手段を試行」は次のいずれかのアプローチを使用して実行を続行します。
- トライステップの右端にある次の分岐。実行ではステップ C をスキップし、ステップ D を続行します
- トライ ステップの左端にある次の分岐。これにより実行ではステップ C と D をスキップし、ステップ E を続行します
[エラー処理] タブでオプションを定義できます。次の例では、ステップ B に対するエラー処理設定を示します。
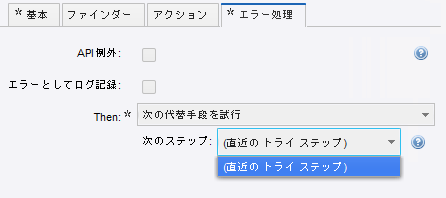
デフォルトは最も近いトライ ステップですが、実行パスでその他のトライ ステップを選択できます。トライ ステップは名前で参照されます。複数のトライ ステップの名前が同じ場合、その名前の最も近いもの (右端) を指します。これは、Try-Catch に記載されているように活用できます。
この例では「次の代替手段を試行」エラー処理との関連で At ターゲットについてのみ説明していますが、そのような参照はルーピングに記載されている「次のイテレーション」および「ループ終了」エラー処理と使用できます。これらの場合には、参照はトライ ステップではなく、ループ ステップに移動します。